グローバルに展開するドローンのオープンソースソフトウェアAruduPilotによる開発を日本からサポートしているランディ・マッケイ氏とドローン・ジャパンが「開発・実証支援」します。
空・陸・水上・水中、及び、屋外・室内の環境に応じた自律型移動型ロボットの各々の課題に対しての機体制御の開発・実証支援をします。

アルデュパイロットの魅力
ランディ・マッケイ氏
主な技術支援内容
-
自己位置推定
自律移動プロセスにとって始点となる自己位置推定(EKF:Extended Kalman Filter<拡張カルマンフィルタ>)の機体制御の適正化 -
衝突回避
各機体や環境、目的に応じた衝突回避の実装 -
非GPS環境での制御
各機体や環境、目的に応じたGPS・GNSSを利用しない機体制御の実装 -
陸上走行・水上航行の安定的なナビゲーション
陸上型・水上型自律型移動ロボットに特化した安定性や精度を高める機体制御 -
機体セキュリティ対策
乗っ取りなどの機体制御に関わる機体・送信機のセキュリティ実装 -
冗長化対策
フライトコントローラー・電波・電源などの冗長化実装 -
機体安定化のための機体チューニング支援
各機体の挙動安定のため各種パラメータの設定およびチューニング支援をします。
ArduPilotに関する初回無料オンライン相談
お申込みフォームより必要事項及び希望日時を選択のうえ送信ください。
担当者よりオンライン相談の日時等をご連絡させていただきます。
※平日限定
担当者よりオンライン相談の日時等をご連絡させていただきます。
※平日限定
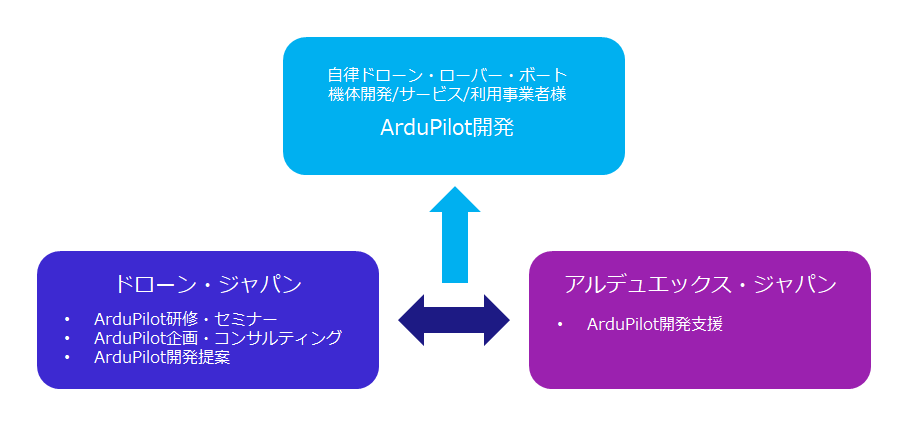
2社の関係性
ドローン・ジャパンではArduPilotの研修・セミナー・企画・コンサルティング・開発提案を行い、それを元にアルデュエックス・ジャパンで開発支援を行っております。